

Сигналы и выходы инкрементального энкодера
Подписывайтесь! Там тоже интересно!
В принципе, простейший энкодер, кроме проводов питания, может иметь один дискретный выход, импульсы на котором будут однозначно говорить о скорости вращения вала, на котором он закреплён:
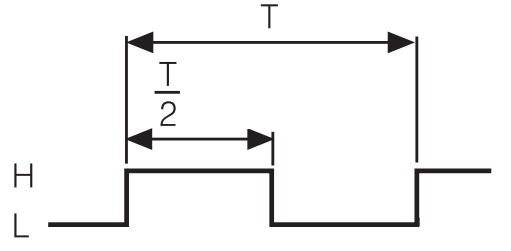
Импульсы на выходе энкодера – один канал
Период Т – величина, обратная частоте, а про частоту мы говорили выше. Уровень “Н” – это напряжение, почти равное напряжению питания (обычно 5, 12, или 24 В). Уровень “L” – около нуля.
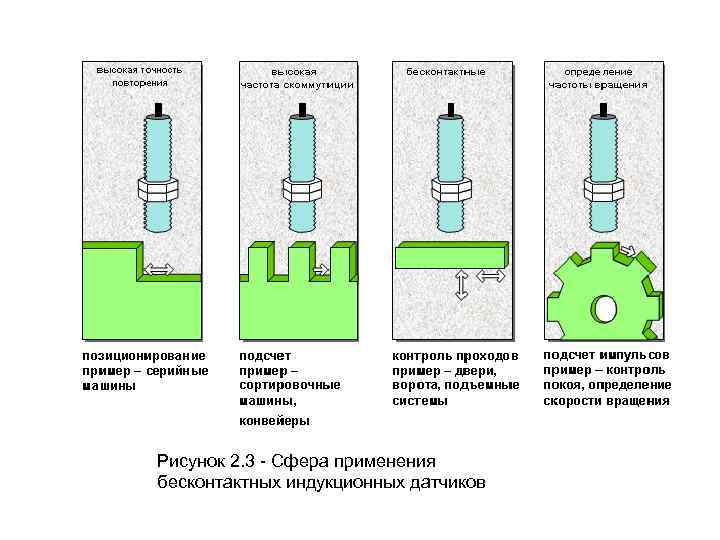
Что может рассказать нам такой энкодер? Только о скорости и погонных метрах. Например, его можно применять для определения частоты вращения двигателя, или длины материала после нажатия кнопки “Сброс”. Неплохо, но хочется большего!
Если будет два выхода, импульсы на которых (оптическим способом) сдвинуты на четверть периода, мы сможем узнать направление вращения:
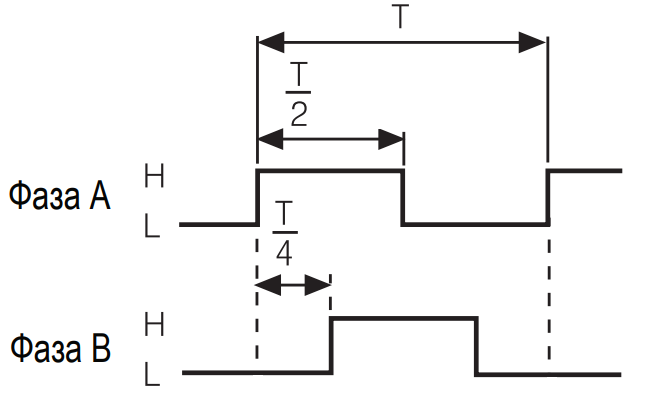
Импульсы каналов А и В с фазовым сдвигом
Такие выходы со сдвигом фаз на четверть периода называются квадратурными каналами. Этот приём широко применяется в радиотехнике и электронике не только для определения направления вращения, но и для определения знака рассогласования частот (больше или меньше опорной частоты?).
Если сдвиг фаз положительный (фаза В отстает), можно условиться о прямом вращении. Если отрицательный (фаза В опережает фазу А на четверть), значит, вращение в обратном направлении. Два этих сигнала с одной частотой и фазой ±90° подаются на триггер, выход которого однозначно указывает о направлении вращения.
Со скоростью, расстоянием и направлением разобрались, а что делать, если нужно узнать угол поворота? Для этого вводится сигнал “Z” (Zero) – опорный импульс, который также называют нуль-меткой или референсной меткой:
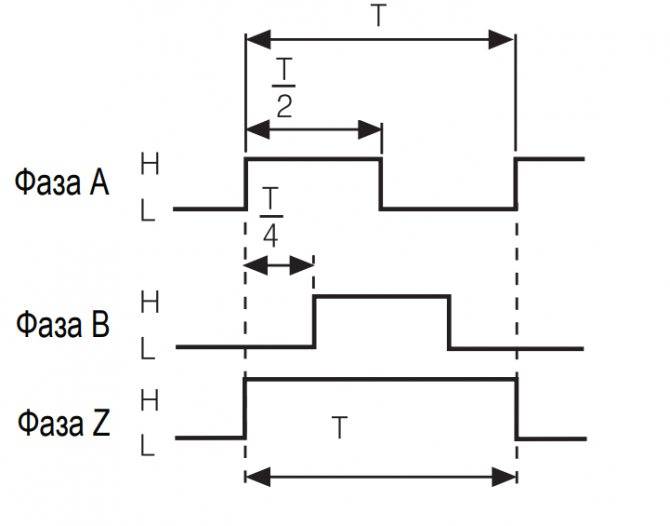
Выходы энкодера А, В с нулевой меткой Z
Импульс “Z” имеет длительность Т (бывает и другая длительность – T/2, или 2Т) и проскакивает 1 раз за оборот вала энкодера. Иными словами, длительность нулевой метки может быть в тысячи раз короче периода вращения вала энкодера.
В современных датчиках каждая фаза (канал) обычно имеет ещё один, противофазный выход.
С теорией заканчиваем, плавно переходим к практике.
Общее описание и назначение
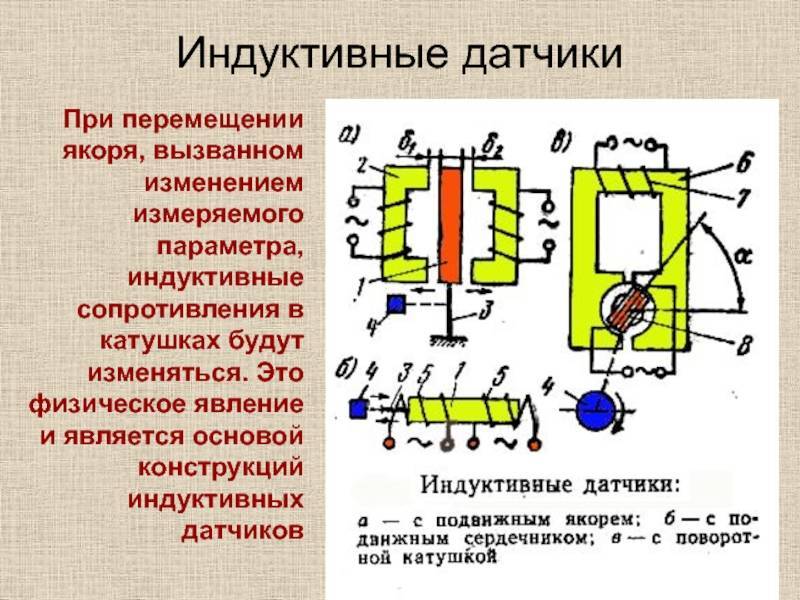
Индуктивным датчиком принято называть устройство, способное преобразовывать механические перемещений контролируемых объектов в электрический сигнал. Представляет собой одну или несколько катушек индуктивности, объединенных с магнитопроводом и подвижным якорем, который регистрирует измерения линейного или углового размера и, перемещаясь, влияет на показатель индуктивности, изменяя ее в одну или другую сторону. Благодаря такой особенности, бесконтактные датчики активно используются в качестве элементов контроля положения металлических объектов.

По схеме построения индукционные датчики принято разделять только на 2 отдельных вида: одинарные и дифференцированные.
Одинарные
Устройства только с одним магнитопроводом. Такая схема обычно применяется при разработке бесконтактных выключателей.
Дифференциальные
Отличаются наличием сразу 2-ух магнитопроводов, каждый из которых специально сделанных в виде «ш». Это позволяет взаимокомпенсировать воздействие, оказываемое на сердечник, повышая таким образом точность производимых измерений. По сути, схема представляет из себя систему из 2-ух датчиков, соединенных общим якорем.

Преимущества и недостатки
Индукционные датчики имеют свои достоинства и недостатки, как и любое другое устройство. Главным преимуществом считается простота конструкции, не требующая сложной настройки и не нуждающаяся в особых условиях для монтирования. Приспособление не имеет скользящих контактов, сделано из прочного материала и может на протяжении длительного времени работать без перерыва.
Стоит также отметить, что прибор очень редко выходит из строя, и ремонт его не представляет сложности. Именно поэтому его часто устанавливают на предприятиях, где необходим почти круглосуточный контроль за производственным процессом. Бесконтактное подключение позволяет без проблем осуществлять соединение с промышленной системой напряжения.
Важным преимуществом считается высокая чувствительность, позволяющая устанавливать датчики на производстве, где работают с металлическими предметами из разных сплавов.
Несмотря на все достоинства приспособления, существуют и некоторые недостатки. Наиболее важным считаются погрешности, которые прибор выдает в работе. Нелинейный тип погрешности проявляется вследствие того, что прибор имеет свой показатель индуктивной величины, который может отличаться от значения тех предметов, на которые он реагирует. Именно поэтому датчик может реагировать на металл некорректно и подавать неверные сигналы.
Часто встречается температурная погрешность, связанная со значительным понижением или повышением температуры в производственном помещении. Инструкция к прибору предполагает его правильное функционирование при показателе +25 градусов. При отклонении значения в ту или иную сторону нарушается работа приспособления.
Одной из случайных погрешностей считается изменение показаний датчика вследствие воздействия на него электромагнитного поля других приборов. Для того чтобы избежать подобных ситуаций, на всех производствах установлен стандарт частоты электроустановок, составляющий 50 Гц. В этом случае риск возникновения погрешности из-за постороннего электромагнитного излучения снижается к минимуму. Исключить любые нарушения в работе устройства можно путем предварительной проработки деталей.
Погрешности датчиков
Бесконтактный индуктивный датчик
Погрешность снятия показаний контрольной системой существенно влияет на работу бесконтактного индуктивного датчика. Ее общая величина набирается из отдельных ошибок измерений по различным показателям: электромагнитным, температурным, аппаратным, магнитной упругости и многим другим.
Электромагнитная погрешность определяется как случайно проявляющаяся величина. Она появляется из-за паразитной ЭДС, наведенной в катушке внешними магнитными полями. В производственных условиях этот компонент создается силовым оборудованием с рабочей частотой 50 Герц. Температурная погрешность – один из важнейших показателей, поскольку работать большинство датчиков могут лишь в определенном диапазоне температур. Она обязательно учитывается при проектировании устройств этого класса.
Погрешность магнитной упругости вводится как показатель нестабильности деформаций сердечника, возникающей в процессе сборки прибора, а также как тот же фактор, но проявляющийся при его работе. Нестабильности внутренних напряжений в магнитопроводе приводит к ошибкам в обработке выходного сигнала. Погрешность, возникающая в самом чувствительном устройстве, проявляется из-за влияния полевой структуры на коэффициент деформации металлических элементов датчика. Кроме того, на ее суммарное значение существенно влияют люфты и зазоры в подвижных частях конструкции.
Погрешность соединительного кабеля набирается из отклонений величины сопротивления его проводных жил в зависимости от температурного фактора, а также как наводки посторонних электромагнитных полей и ЭДС. Тензометрическая погрешность как случайная величина зависит от качества изготовления намоточных элементов датчика (его катушки, в частности). В различных условиях эксплуатации возможно изменение сопротивления обмотки по постоянному току, приводящее к «плаванию» выходного сигнала. Погрешность старения проявляется вследствие износа подвижных элементов датчика, а также изменения электромагнитных свойств магнитопровода.
Проверить реальную величину этого параметра удается только с помощью сверхточных измерительных приборов
При этом обязательно принимаются во внимание кинематические особенности самого датчика. При проектировании и изготовлении чувствительных элементов такая возможность заранее учитывается в его конструкции
Устройство биполярного транзистора
https://youtube.com/watch?v=iqraL2VcOjw
Элемент назвали биполярным, потому что в его работе принимают участие сразу 2 типа зарядных носителей – электроны (устойчивые отрицательно заряженные элементарные частицы) и дырки (квазичастицы с положительным зарядом). Работа ранее разработанного униполярного (полевого) устройства основана на применении лишь одного из носителей. Прибор имеет 3 слоя, на каждый из которых подается напряжение:
- эмиттер;
- база (базовая плата, пластина);
- коллектор.
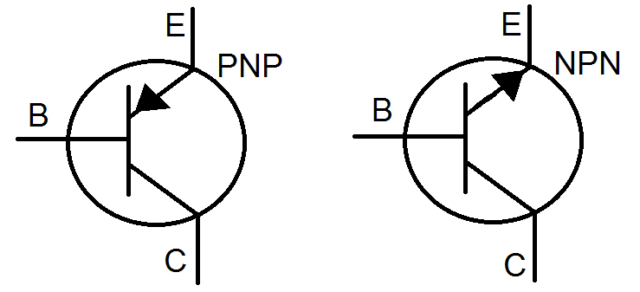
Negative — это кремниевый сплав. Он обладает избытком отрицательных переносчиков заряда — электронов (n-doped), а positive — избытком положительных «дырок» (p-doped).
База очень тонкая, представлена слаболегированным полупроводником, поэтому она имеет сильное сопротивление. Коллектор, как правило, шире эмиттера. Поэтому общая площадь соединения база-коллектор значительно превышает комплекс база-эмиттер. Менять местами эти 2 области за счет изменения полярности нельзя. Транзистор не относится к симметричным элементам — это необходимо для его правильной работы.
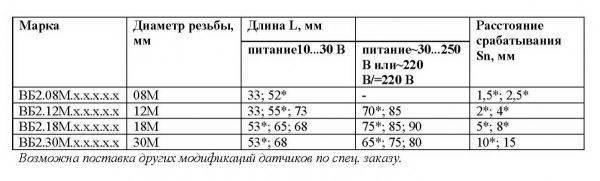
Параметры индуктивного датчика
Один из параметров уже описывался выше – это диапазон срабатывания. Хотя, как утверждают специалисты, он не является важным, но именно по нему и делают выбор. Все дело в том, что в паспорте изделия указываются номинальные параметры напряжения при работе прибора в температурном режиме +20С. Постоянное напряжение составляет 24 вольт, переменное – 230 вольт. Как вы понимаете, в таких условиях индукционный датчик обычно не работает, а если и работает, то редко. При этом в качестве объекта, который будет изменять индуктивность катушки прибора, должна выступать стальная пластина, ее ширина должна быть равна трем диапазонам срабатывания и толщиною 1 мм.
Как ответить на вопрос: что это такое — триггер?
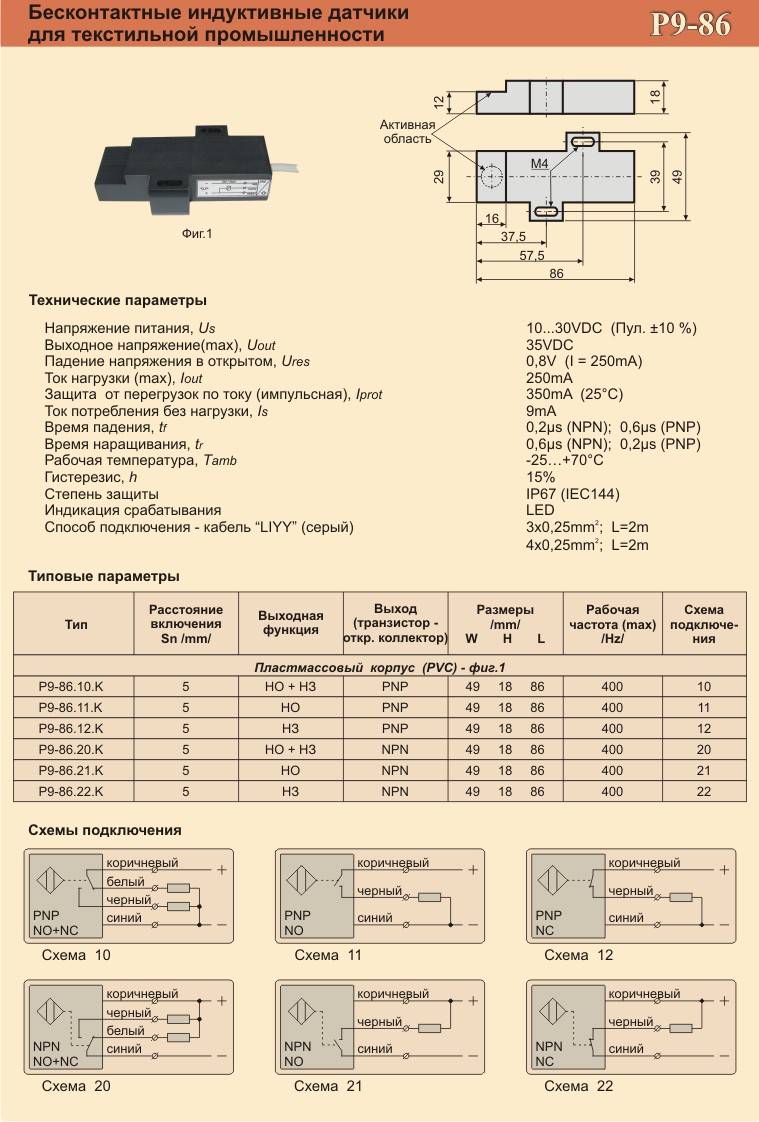
 Маркировка
Маркировка
На практике же за основу выбора берут два показателя диапазона срабатывания:
- Эффективный.
- Полезный.
Показания первого отличаются от номинального параметра в пределах ±10%. При этом температурный диапазон расширяется от +18С до +28С. Второй определяется, как ±10% от первого при температурном режиме от 25 до 70С. И если при первом параметре используется номинальное напряжение в сети, то при втором присутствует разброс от 85% до 110% от номинала.



Есть еще один параметр, который связан с зоной срабатывания. Это гарантированный предел. Его нижняя часть равна «0», а верхняя 81% от номинального диапазона.
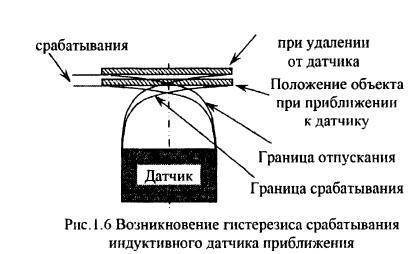
Необходимо учитывать и такие параметры, как гистерезис и повторяемость. Что такое гистерезис в этом случае? По сути, это расстояние между дальними позициями срабатывания датчика. Оптимальное его значение – это 20% от эффективного диапазона срабатывания.
Не последнее значение имеет и материал, из которого изготавливается объект слежения (перемещения). Оптимальный вариант – сталь 37, ее коэффициент редукции равен «1». Все остальные металлы имеют меньший коэффициент. К примеру, нержавейка – 0,85, медь – 0,3. Как понять, на что влияет коэффициент редукции? Для примера возьмем медную пластину. То есть, получается так, что диапазон срабатывания будет равно 0,3, умноженному на полезный диапазон срабатывания. Достаточно низкий показатель.
Перечислим и другие не столь важные параметры6
Постоянное напряжение имеет диапазоны: 10-30, 10-60, 5-60 вольт. Переменное 98-253 вольт.
Индуктивные прямоугольные датчики серии RN
- Ток нагрузки (номинальный) – 200 мА. Сегодня производители иногда производят датчики с токовой нагрузкой 500 мА. Это так называемое специсполнение.
- Частота отклика. Суть этого параметра заключается в том, что он показывает максимальное значение возможности переключаться. Измеряется данный параметр в герцах. Так для основных промышленных датчиков этот показатель равен 1000 Гц.
Реальные датчики
Датчики купить проблематично, товар специфический, и в магазинах электрики такие не продают. Как вариант, их можно купить в Китае, на АлиЭкспрессе.
А вот какие оптические датчики я встречаю в своей работе.
Вариант №1: воспользоваться специальным преобразователем, например устройством согласования сигналов УСМ, которое представлено у нас в ассортименте, или аналогичным.
Вариант №2: если вы хотя бы минимально дружите с паяльником, сделать преобразователь самому.
Если в наличии есть датчик с PNP выходом, а нужен NPN — собираем вот такую схему:
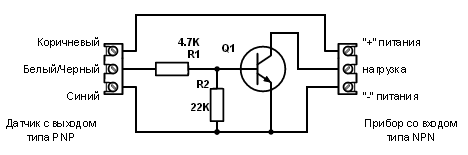
Транзистор Q1 — любой подходящий NPN, например 2SC495, BC445, BD237.
Если же в наличии имеется датчик с NPN выходом, а нужен PNP — такую схему:
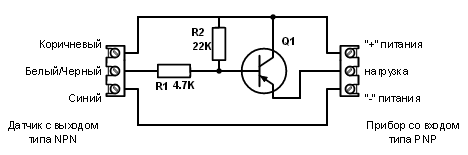
Транзистор Q1 — любой подходящий PNP, например 2N5401, КТ502Д.
Характеристики индуктивных датчиков
Чем отличаются датчики.
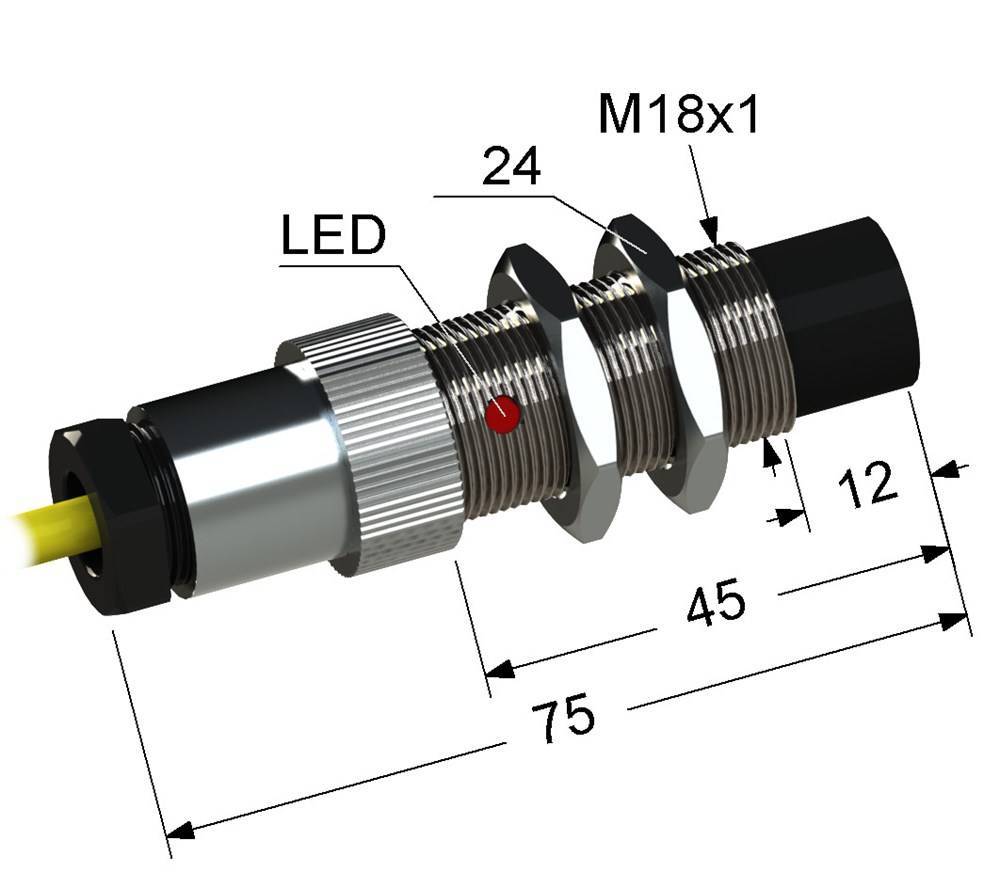
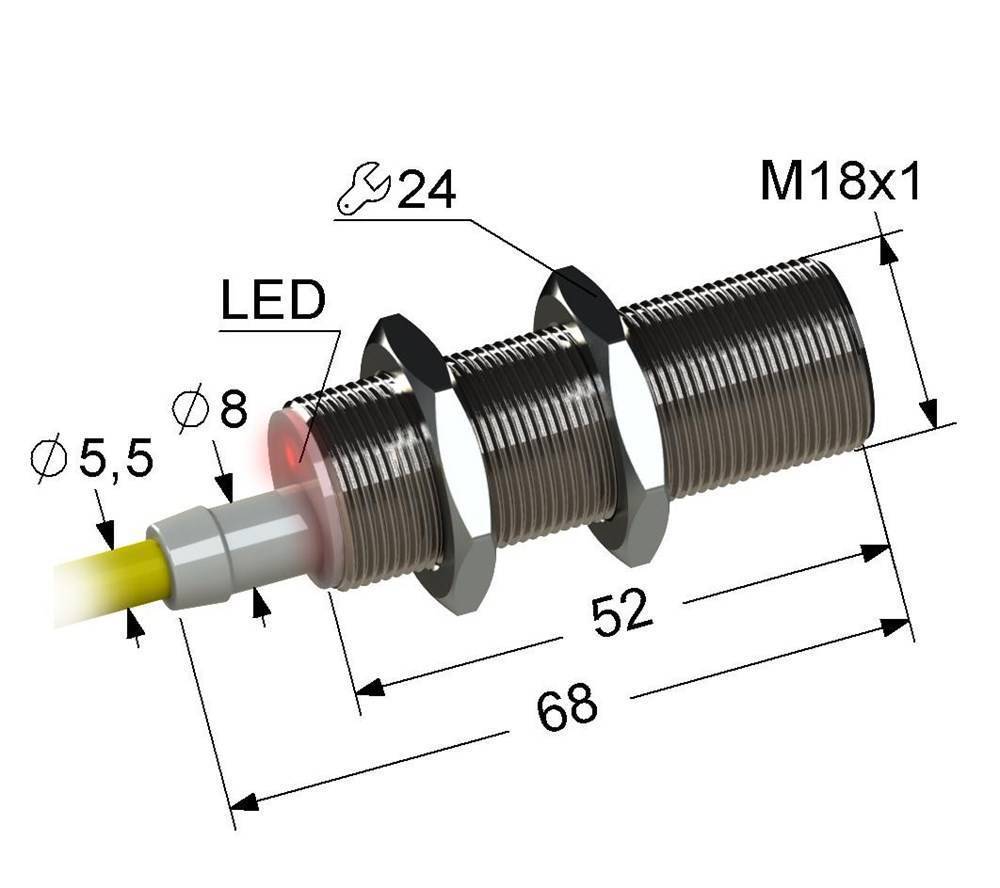
Конструкция, вид корпуса
Тут два основных варианта – цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик.
Расстояние переключения (рабочий зазор)
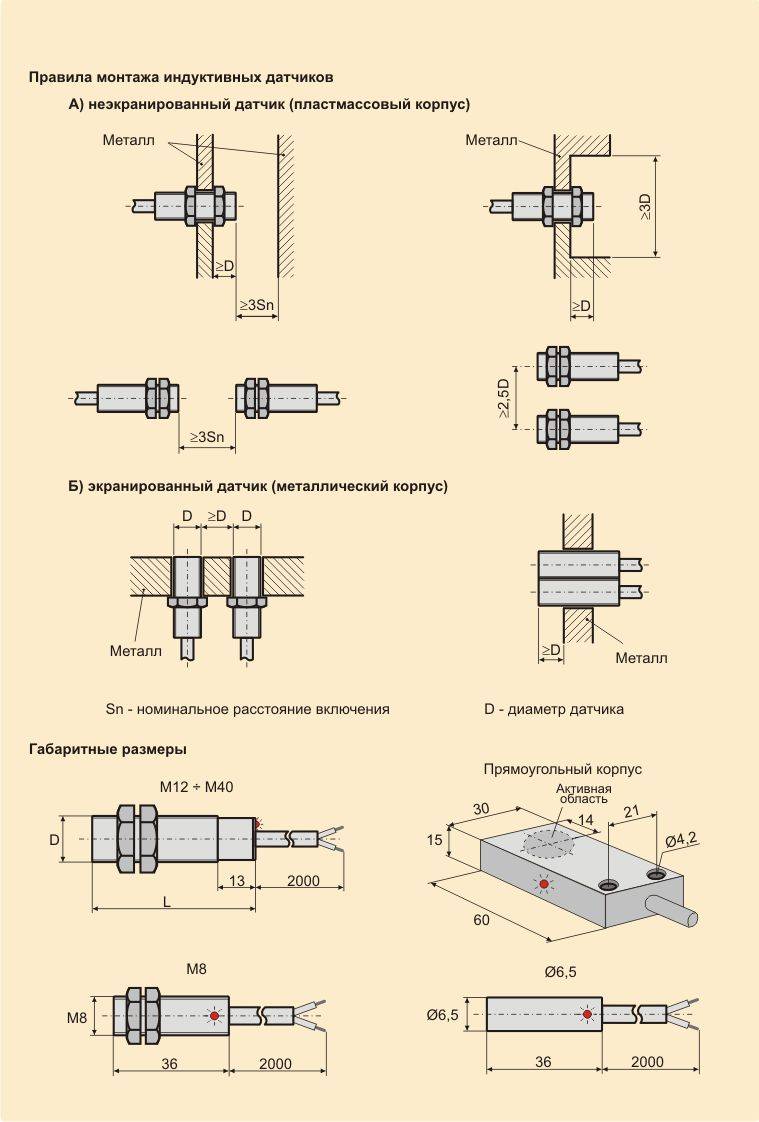
Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм.
Количество проводов для подключения
Подбираемся к схемотехнике.
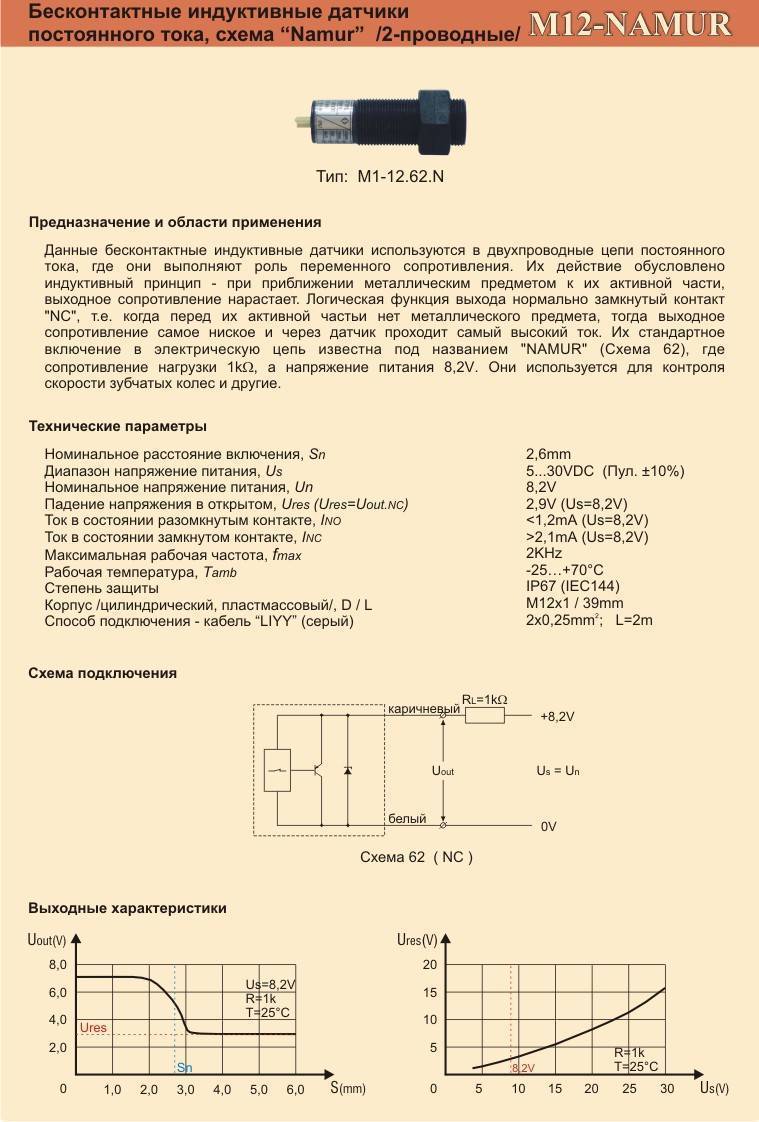
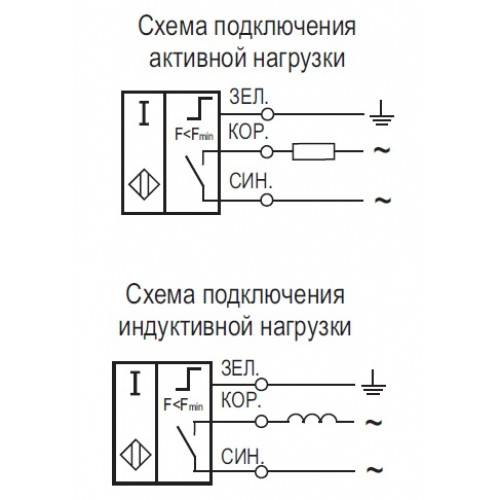
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.
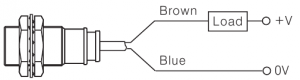
2-проводный датчик. Схема включения
Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность
Можно вообще не думать, как их подключать
Главное – обеспечить ток
Можно вообще не думать, как их подключать. Главное – обеспечить ток.
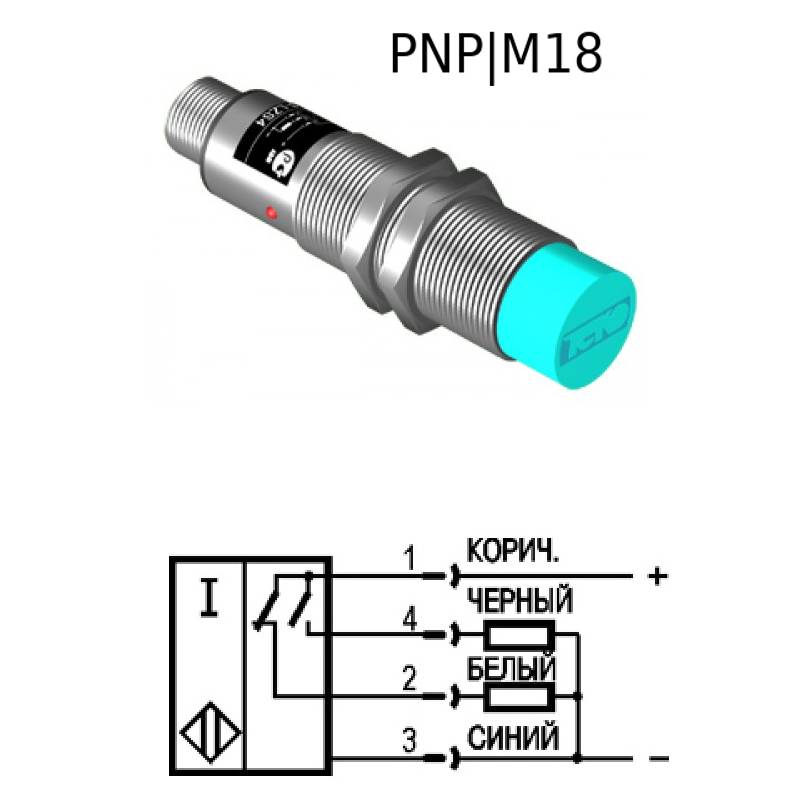
3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно.
4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода.
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.
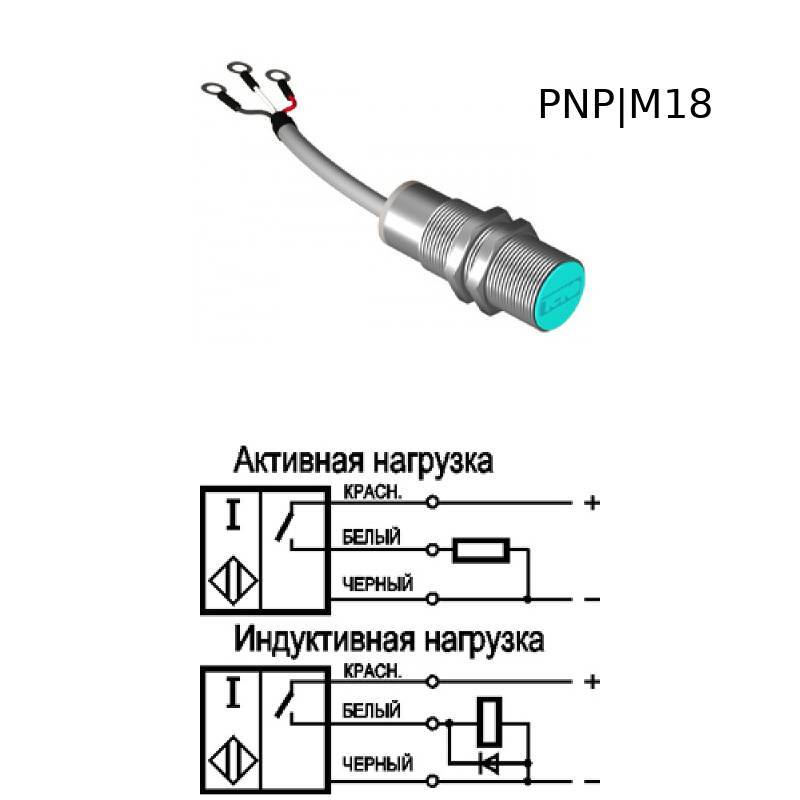
Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно.
Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.
Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО.
То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Контакты датчиков также могут быть с задержкой включения или выключения. Про такие контакты также сказано в статье про приставки выдержки времени ПВЛ. А почему датчики, отвечающие за безопасность, должны быть обязательно с НЗ контактами – см. статью про Цепи безопасности в промышленном оборудовании.
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Продолжение статьи – здесь >>>. Во второй части даны реальные схемы и рассмотрено практическое применение различных типов датчиков с транзисторным выходом.


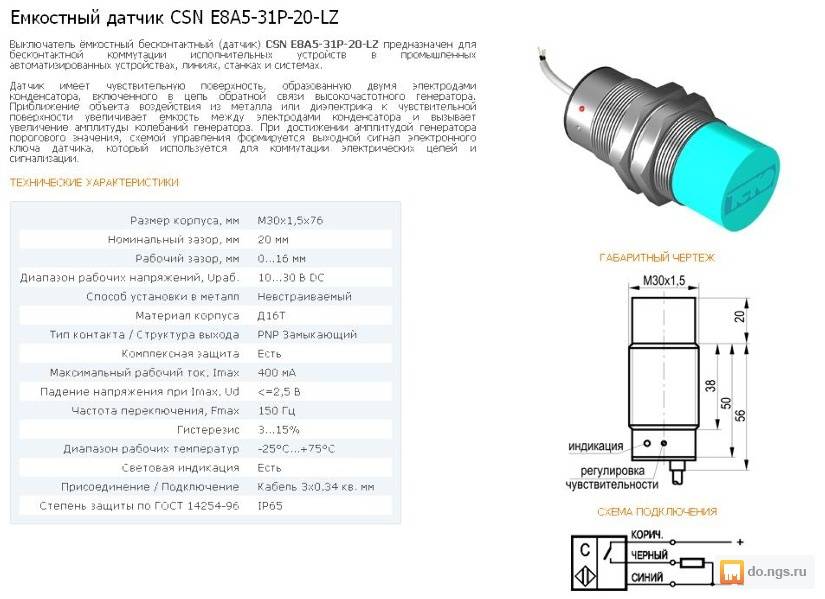
Обзор емкостных датчиков CR
CR – серия емкостных цилиндрических датчиков от Autonics (рисунок 9).
Выпускаются датчики двух типоразмеров – CR18 и CR30 с зонами чувствительности 8 и 15 мм соответственно.
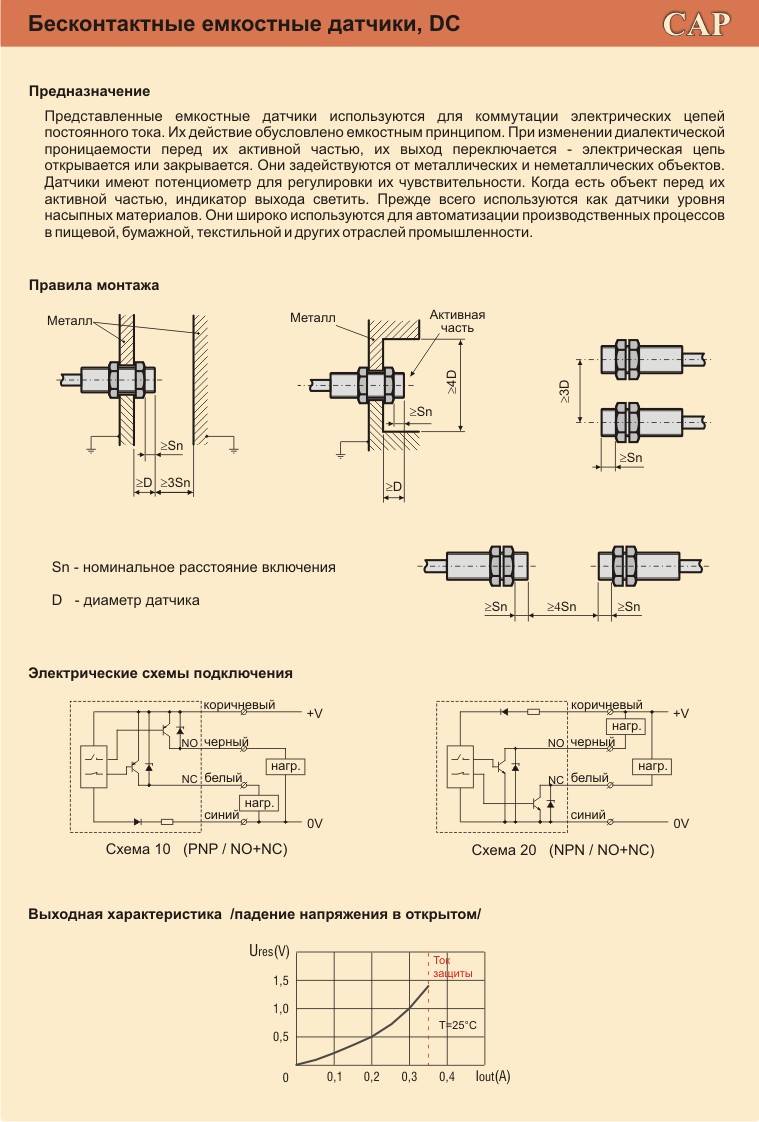
Двухпроводные нормально разомкнутые версии CRxx-xAO и двухпроводные нормально замкнутые версии CRxx-xAС работают с переменным выходным напряжением 110…240 В и током 5…200 мА. Частота срабатывания – 20 Гц.
Трехпроводные версии предназначены для работы в цепях постоянного напряжения 10…30 В с выходными токами до 200 мА. Их частота срабатывания достигает 50 Гц (таблица 8).
Таблица 8. Основные характеристики трехпроводных датчиков семейства CR
| Параметр | Наименование | |||
| CR18-8DN, CR18-8DP, CR18-8DN2 | CR30-15DN, CR30-15DP, CR30-15DN2 | CR18-8AO, CR18-8AC | CR30-15AO, CR30-15AC | |
| Зона чувствительности, мм | 8 | 15 | 8 | 15 |
| Гистерезис | Макс. 20% от расстояния срабатывания | |||
| Стандартный объект для обнаружения (железо), мм | 50x50x1 | |||
| Рабочий зазор, мм | 0…5,6 | 0…10,5 | 0…5,6 | 0…10,5 |
| Напряжение питания ном., В | 12/24 | 100/240 | ||
| Предельное напряжение питания, В | 0…30 | 85…264 | ||
| Ток потребления, мА | Макс. 15 | Макс. 2,2 | ||
| Частота срабатывания *, Гц | 50 | 20 | ||
| Температурный дрейф | Макс. ±10% от расстояния срабатывания при температуре окружающей среды 20°С | |||
| Номинальный ток, мА | Макс. 200 | |||
| Сопротивление изоляции | Мин. 50 МОм (500 В=) | |||
| Электрическая прочность диэлектрика | ~1500 В, 50/60 Гц в течение 1 минуты | |||
| Стойкость к вибрациям | амплитуда 1 мм при частоте 10…55 Гц по каждому из направлений X, Y, Z в течение 2 часов | |||
| Стойкость к ударным нагрузкам | 500 м/с2 (примерно 50g) направления X, Y, Z 3 раза | |||
| Индикатор | Индикатор работы (красный светодиод) | |||
| Рабочая температура, °C | -25…70 | |||
| Температура хранения, °C | -30…80 | |||
| Влажность, % | 35…95 | |||
| Встроенная защита | от перенапряжения, обратной полярности | от перенапряжения | ||
| Степень защиты (IP) | IP66 | IP65 | IP66 | IP65 |
| Масса, г | 76 | 206 | 70 | 200 |
* – Частота срабатывания представляет собой среднее значение: стандартный объект с удвоенной шириной на расстоянии 1/2 от номинального. Состояние датчика можно определить по светодиоду. Если он светится – ток поступает в нагрузку.
Код для заказа датчиков серии CR включает 5 позиций: тип датчика, форму, диаметр головки, код зоны чувствительности, код типа выходного каскада (таблица 9).
Таблица 9. Именование датчиков семейства CR
| C | R | 30 | -15 | DN | |
| Тип датчика | Форма корпуса | Диаметр головки датчика, мм | Зона чувствительности, мм | Тип выхода | |
| С – емкостной | R – цилиндр | 18 | 8 | DN | 3-проводной, NPN, нормально разомкнутый, питание 24 В DC |
| 30 | 15 | DN2 | 3-проводной, NPN, нормально замкнутый, питание 24 В DC | ||
| DP | 3-проводной, PNP, нормально разомкнутый, питание 24 В DC | ||||
| DP2 | 3-проводной, NPN, нормально замкнутый, питание 24 В DC | ||||
| AO | 2-проводной, нормально разомкнутый, питание 110…240 В AC | ||||
| AС | 2-проводной, нормально замкнутый, питание 110…240 В AC |
Стоит отметить и высокую степень защиты: IP66 – для CR18, IP66 – для CR30. Изоляционные свойства также на высоте. Так как емкостные датчики способны обнаруживать не только металлические объекты, то спектр приложений серии CR еще шире, чем у индуктивных датчиков. Сфера их применения:
- концевые выключатели станков;
- детекторы автоматических линий розлива молока, пива, и тому подобное;
- датчики уровня жидкости;
- детекторы обнаружения брака в текстильном производстве.
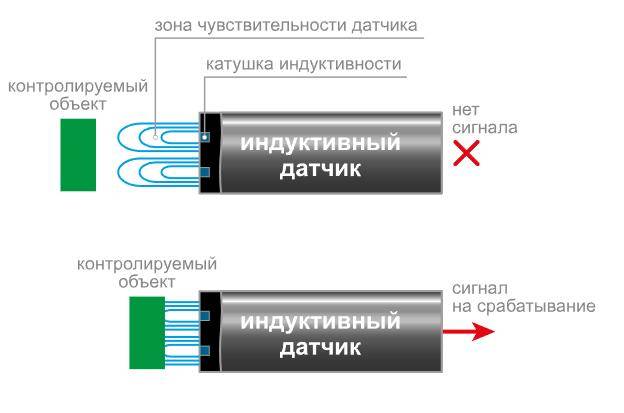
Принцип работы индуктивного датчика
В отличие от популярных в прошлом электромеханических выключателей индуктивные датчики относятся к оборудованию с бесконтактным принципом работы, т. е. для срабатывания датчику не требуется физический контакт с объектом. Это означает отсутствие механического износа, что оказывает существенное влияние на время жизни компонентов и исключает необходимость их обслуживания. В силу принципа действия индуктивные датчики используются в случаях, когда требуется определять металлический, либо изготовленный из магнитных/ферромагнитных материалов объект или предмет. Неметаллические объекты датчиком игнорируются.
В общем случае индуктивный датчик состоит из нескольких основных компонентов
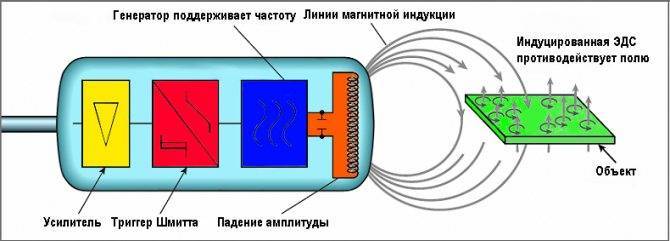
— металлический (чаще всего латунный или стальной), либо пластиковый корпус, в котором помещаются все компоненты датчика;
— катушка колебательного контура, находящаяся непосредственно за пластиковой или металлической т. н. чувствительной поверхностью датчика;
— генератор, создающий электромагнитное поле;
— триггер Шмитта, преобразующий аналоговый сигнал в логический дискретный;
— усилитель, обеспечивающий достаточный уровень выходного сигнала для дальнейшей его передачи;
— один или несколько светодиодных индикаторов – чаще всего для индикации срабатывания, но в отдельных случаях также указывающий на наличие питания датчика и статус конфигурирования;
— компаунд, которым заливается всё внутреннее пространство датчика для защиты электронных компонентов от попадания влаги и мелких частиц;
— кабель, клеммная коробка, либо разъём для подключения датчика.
Принцип действия
индуктивного датчика основывается на изменении индуктивности катушки и сердечника – потому датчик и называется индуктивным. Он сводится к нескольких основным этапам:
— на датчик подаётся питание
— генератор вырабатывает магнитное поле в области катушки
— при попадании в область действия датчика металлического, магнитного или ферромагнитного объекта в нём наводятся вихревые токи, изменяющие амплитуду колебаний генератора
— изменение амплитуды обеспечивает выходной аналоговый сигнал
— триггер Шмитта преобразует аналоговый сигнал в логический дискретный
— усилитель повышает уровень сигнала до необходимого значения
Как и любое другое электронное устройство, индуктивный датчик обладает рядом основных и второстепенных параметров. Первые являются основными при подборе датчика для решения конкретной задачи, в то время как вторые позволяют установить пригодность датчика для использования в специфических условиях.
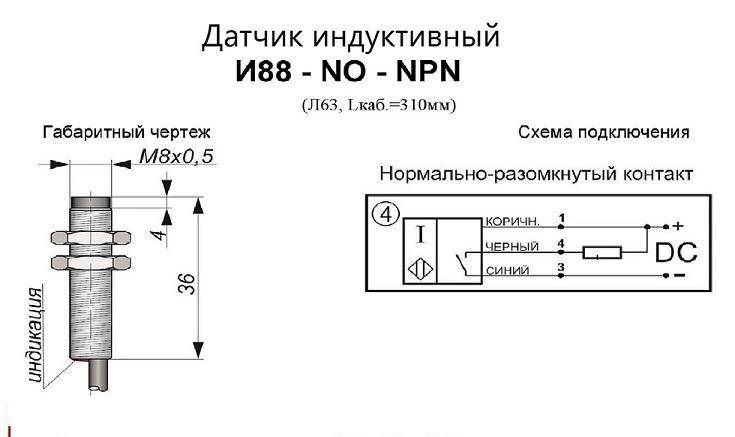
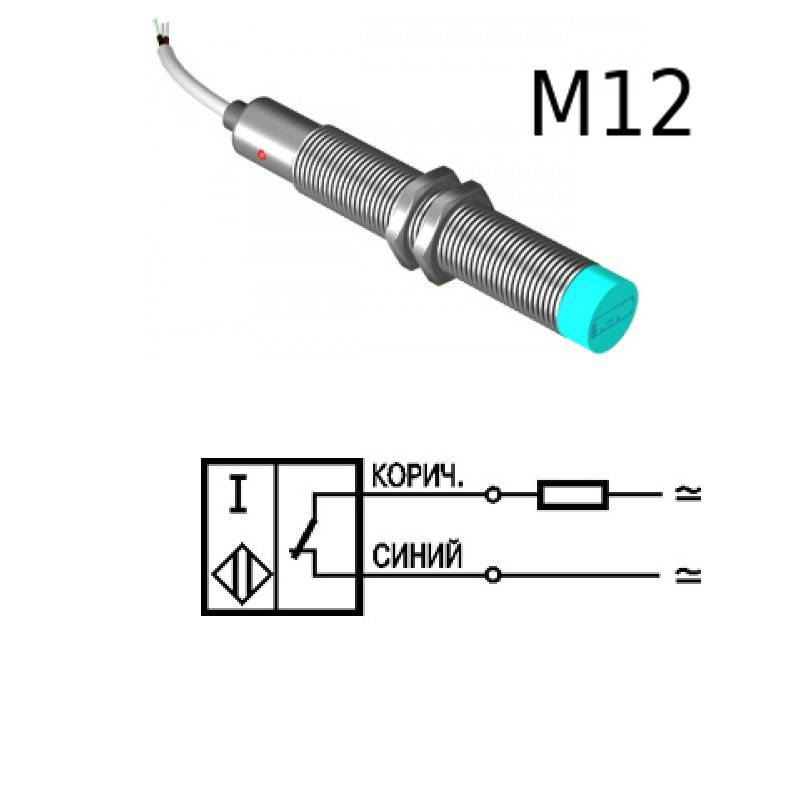
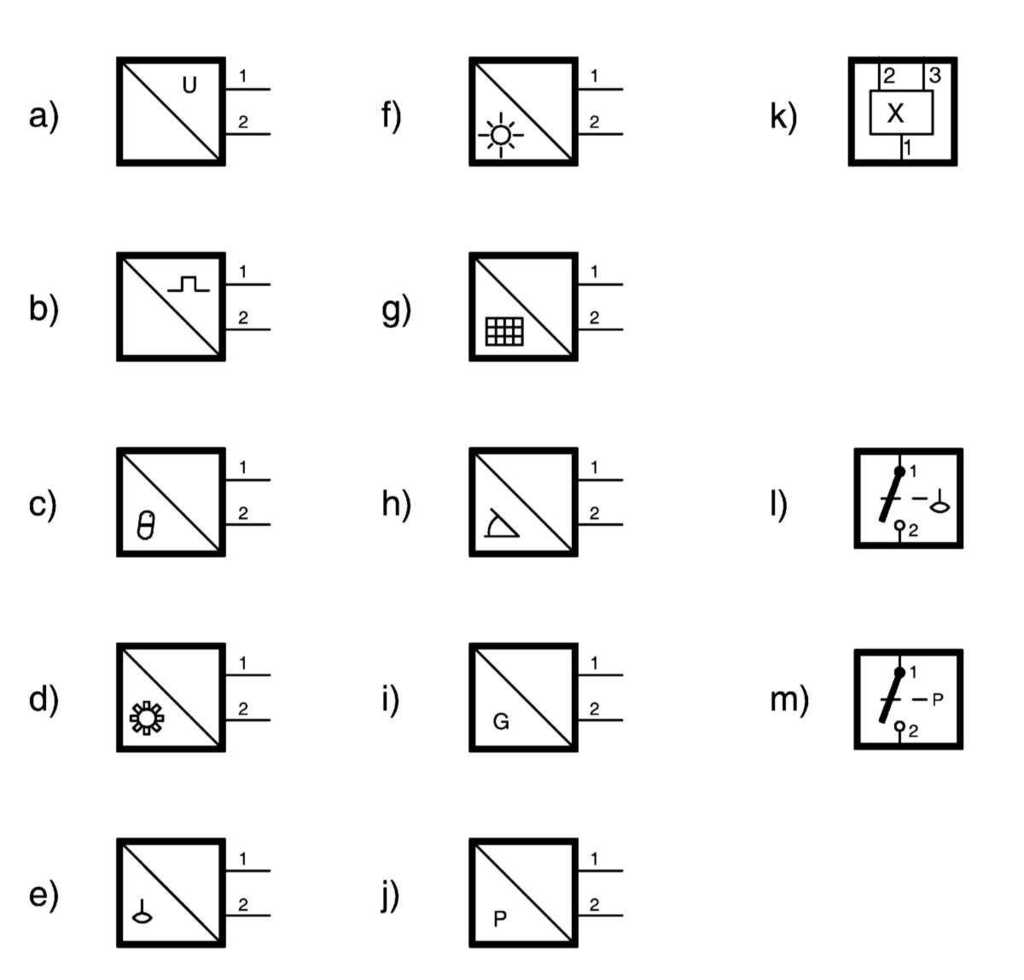
Маркировка при подключении
На принципиальных схемах индуктивные датчики принято обозначать в виде ромба или квадрата с двумя вертикальными линиями внутри. Нередко в них также указывается тип выхода (нормально открытый или закрытый), соответствующий одной из разновидностей полупроводниковых транзисторов. В большинстве вариантов схем указывается нормально закрытая группа или оба типа в одном корпусе.
Цветовая маркировка выводов
Перед установкой датчика необходимо сверить данные с инструкцией
На практике применяется стандартная система маркировки выводов датчиков индуктивности, которой придерживаются все без исключения производители чувствительных приборов. Тем не менее, перед их монтажом рекомендуется внимательно следить за полярностью подключения и обязательно сверяться с прилагаемой к изделиям инструкцией.
На корпусах всех датчиков имеется рисунок с цветной маркировкой проводов, если это позволяют его размеры.
Стандартный порядок обозначения:
- синий (Blue) всегда означает минусовую шину питания;
- коричневым цветом (Brown) обозначается плюсовой проводник;
- черный (Black) соответствует выходу датчика;
- белый (White) – это дополнительный выход или вход.
Для уточнения последнего маркировочного обозначения его следует сверить с данными инструкции, прилагаемой к конкретному прибору.
Re: Подключение индуктивного датчика
А схему подключения не подскажите? Ведь мне надо подтягивать землю к входу ,а не питание.
seaw688 Новичок Сообщения: 5Зарегистрирован: 02 апр 2016, 11:44 Репутация: Настоящее имя: Владислав
Это интересно: Выбивает трехфазный автомат на вводе: в чем причина?
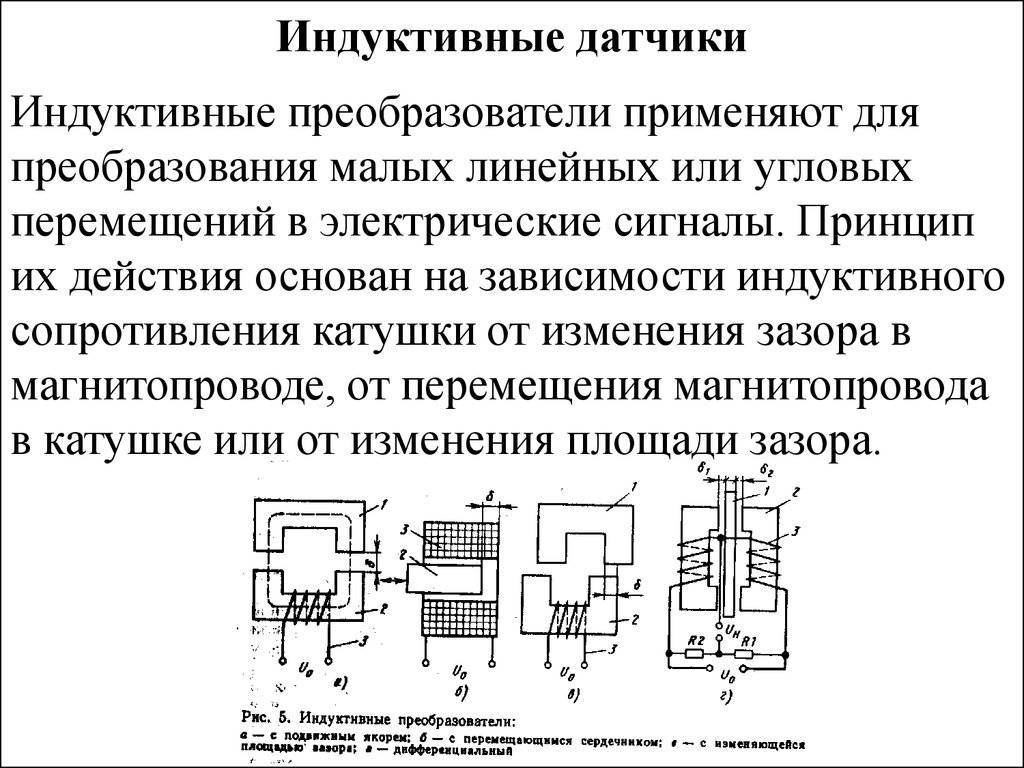
Индуктивные датчики. Виды. Устройство. Параметры и применение
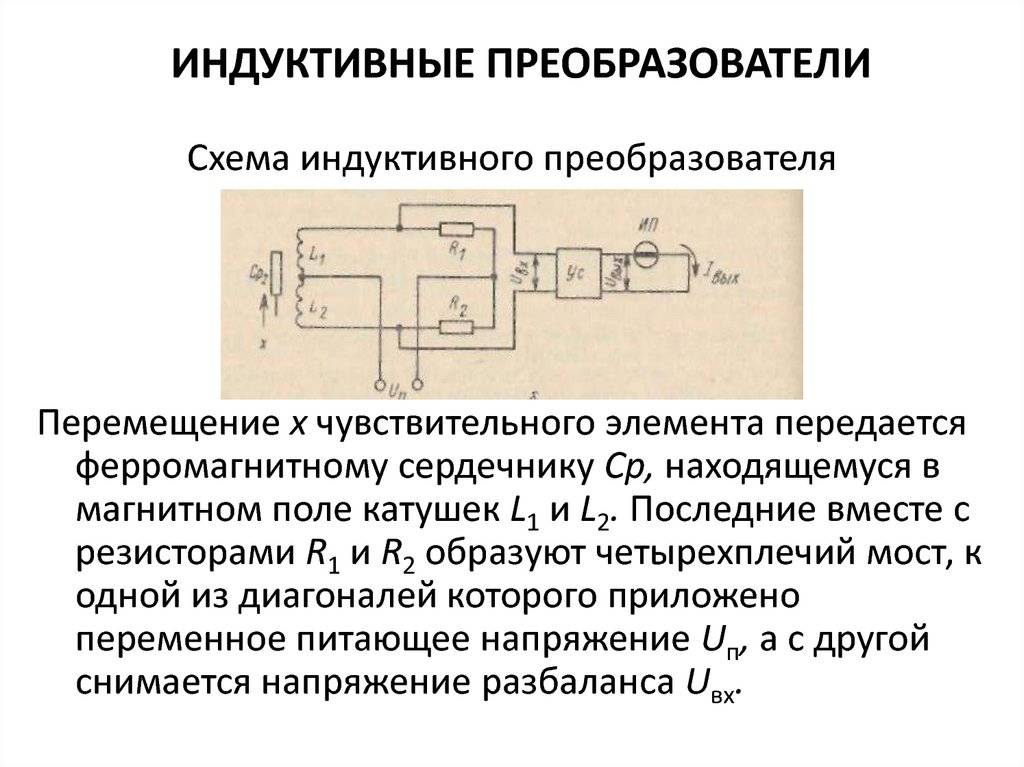
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.

Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:


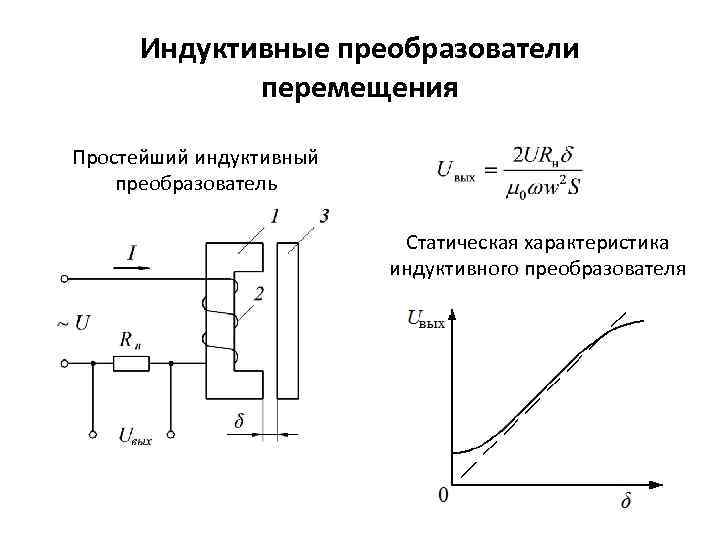

L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмжв сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Транзисторные пары в схемах управления электродвигателями
Их применяют также в H-мостовых цепях управления реверсивными двигателями постоянного тока, позволяющих регулировать ток через двигатель равномерно в обоих направлениях его вращения.
H-мостовая цепь выше называется так потому, что базовая конфигурация ее четырех переключателей на транзисторах напоминает букву «H» с двигателем, расположенным на поперечной линии. Транзисторный H-мост, вероятно, является одним из наиболее часто используемых типов схемы управления реверсивным двигателем постоянного тока. Он использует «взаимодополняющие» пары транзисторов NPN- и PNP-типов в каждой ветви, работающих в качестве ключей при управлении двигателем.
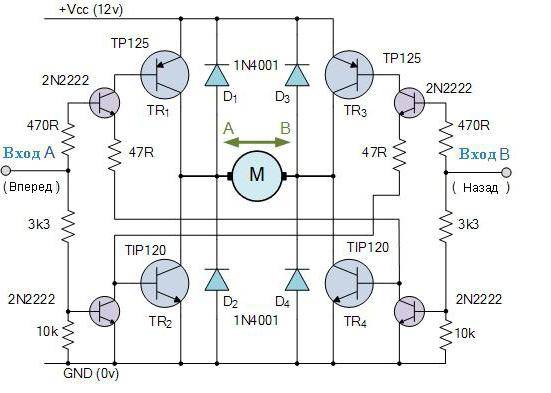
Вход управления A обеспечивает работу мотора в одном направлении, в то время как вход B используется для обратного вращения.
Например, когда транзистор TR1 включен, а TR2 выключен, вход A подключен к напряжению питания (+ Vcc), и если транзистор TR3 выключен, а TR4 включен, то вход B подключен к 0 вольт (GND). Поэтому двигатель будет вращаться в одном направлении, соответствующем положительному потенциалу входа A и отрицательному входа B.
Если состояния ключей изменить так, чтобы TR1 был выключен, TR2 включен, TR3 включен, а TR4 выключен, ток двигателя будет протекать в противоположном направлении, что повлечет его реверсирование.
Используя противоположные уровни логической «1» или «0» на входах A и B, можно управлять направлением вращения мотора.
Как действует датчик?
Индуктивный датчик за счет своего внутреннего устройства имеет определенный принцип действия. В нем используется специальный генератор, который выдает определенную амплитуду колебаний. Когда в поле действия агрегата попадает объект, состоящий из металлического или ферромагнитного материала, то колебания начинают меняться, что и сигнализирует о наличии предмета. Из-за этого датчики работают только с подобными материалами и бесполезны в других случаях.
- При начале работы на конечный выключатель подается питание, что способствует образованию магнитного поля. Именно оно влияет на вихревые токи, которые, в свою очередь, меняют амплитуду колебаний у работающего генератора.
- Результат всех этих преобразований — получение выходного сигнала, который может варьироваться, в зависимости от расстояния между работающим датчиком и исследуемым предметом. Затем при помощи специального устройства аналоговый сигнал преображается в логический.
- Индуктивный датчик также нужен, чтобы распознавать положение металлических предметов. Это может играть важную роль на производстве. Если по линии следуют изделия, на которых металлические детали должны быть расположены в определенном порядке, то датчики проконтролируют правильность этого расположения. В случае обнаружения ошибки устройство подаст сигнал на конвейер, и программа предпримет дальнейшие действия для устранения проблемы.

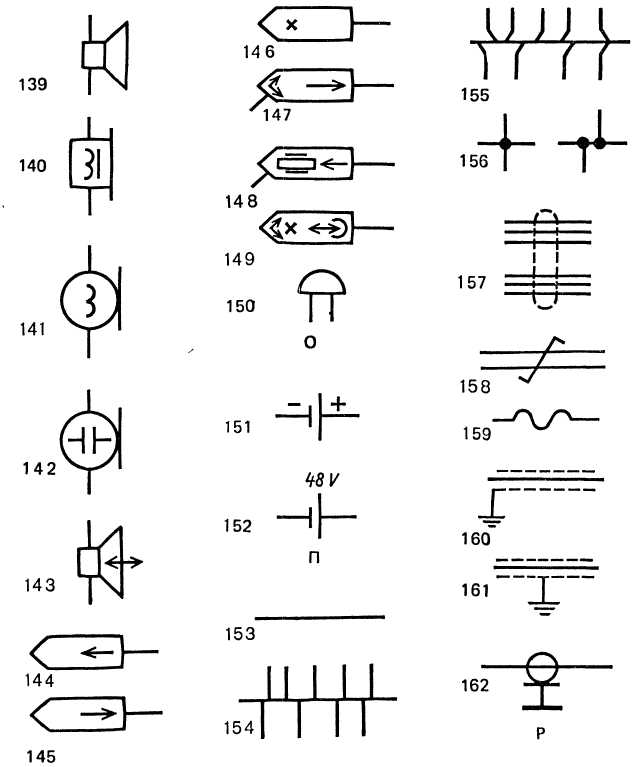
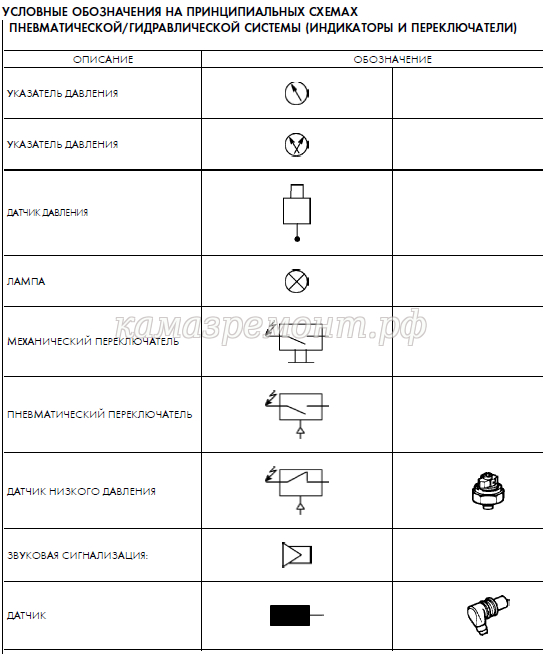
Условные обозначения элементов технологических схем
G — Пересечение с отсутствием соединения. Чтение и составление принципиальных схем является неотъемлемой частью промышленного инженера.
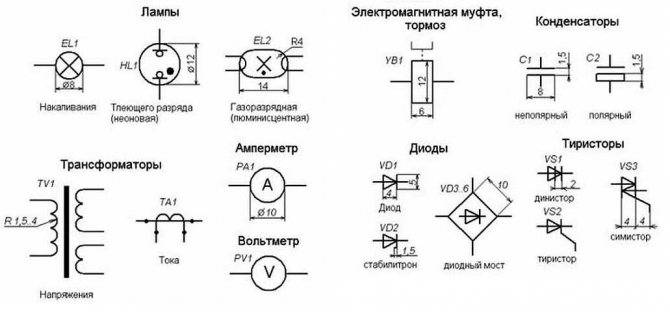
Обозначение элементов на принципиальных схемах.
Основные правила составления принципиальных схем: Разбейте устройство на функциональные части: питание конечные входные устройства и прохождение сигнала до решающего устройства конечные выходные устройства и сигналы к ним от решающего устройства решающее устройство обмен данными с другим оборудованием Хорошо если удастся изобразить эти части на отдельных листах Движение сигналов схемы всегда! Виды электрических схем В соответствии с нормами ЕСКД под схемами подразумеваются графические документы, на которых при помощи принятых обозначений отображаются основные элементы или узлы конструкции, а также объединяющие их связи.
Например, в режиме подсчета импульсов — тахометр, или количество заготовок. Обычно полный номинал элемента указывается в перечне, прилагаемом к принципиальной схеме, но ГОСТ 2.

При чтении электрической схемы следует внимательно учитывать все линии и параметры чертежа, чтобы не спутать назначение элемента.
Принципиальная схема определяет полный состав элементов изделия и связей между ними и, как правило, даёт детальное представление о принципе работы изделия; служит основанием для разработки др.
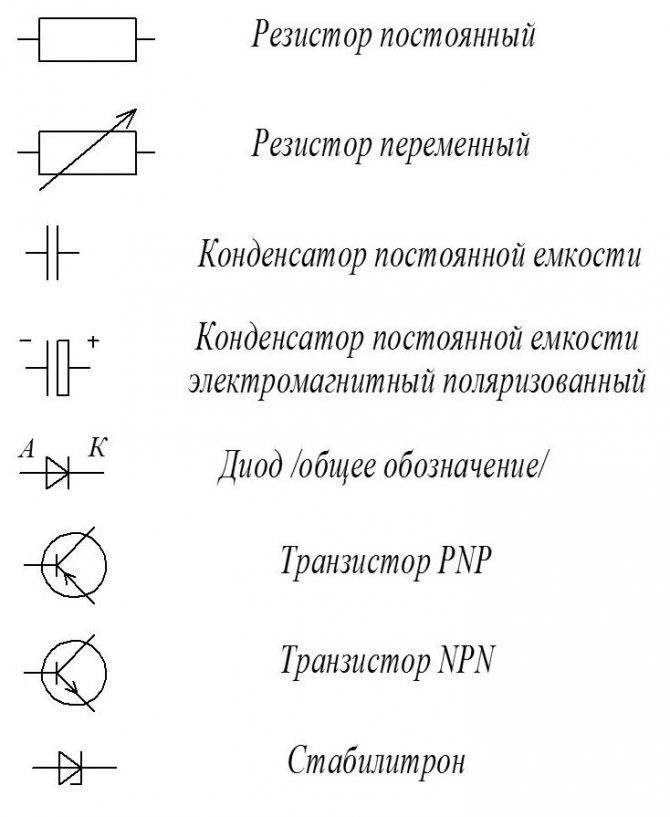
Графическое изображение соединений. Как на схемах, изображённых ниже. Урок 2 Условные графические обозначения элементов цепи
Цветовая маркировка выводов
Все, что связано с электрическими сетями, особенно проводниками, обязательно обозначается цветовой маркировкой. Делается это для удобства проведения монтажа и обслуживания. Индуктивный датчик этого также не избежал. В нем выходы обозначены определенными стандартными цветами:
- Минус – синий цвет.
- Плюс – красный.
- Выход – черный.
- Бывает и второй выход, он белого цвета, который может быть и входом в систему управления. Об этом производитель обязательно информирует в инструкции.
 Разновидности индукционных датчиков
Разновидности индукционных датчиков
И последнее – это конструктивные особенности, которые касаются корпуса датчика. Он может иметь цилиндрическую или прямоугольную форму. Изготавливается из металлических сплавов или пластика. Чаще всего в промышленности используются цилиндрические приборы диаметром 12 или 18 мм. Хотя есть в этой размерной линейке и другие параметры: 4, 8, 22 и 30 мм.
Бесконтактный датчик индуктивности позиционируется как сенсор, способный реагировать на металлические предметы, оказавшиеся в его электромагнитном поле. Благодаря этому свойству индуктивных бесконтактных датчиков удается отслеживать перемещение подвижных частей оборудования и при необходимости отключать двигатель приводного механизма. Для распознавания и анализа изменений магнитного поля в их состав вводится специальный электронный узел, называемый контроллером (компаратором).





